Tarek Hamel : « Comprendre les contraintes des drones aériens pour mieux les contrôler »
Membre senior de l’Institut Universitaire de France depuis le 1er octobre 2017, Tarek Hamel se consacre à la commande robuste de drones aériens. Il souhaite unifier les méthodologies de contrôle de divers robots aériens et développer des algorithmes d’observation de l’état dédiés à partir de capteurs embarqués. Ce projet est motivé par des applications émergentes toujours plus nombreuses, telles que la surveillance du trafic routier, l’inspection régulière des ponts, des lignes haute tension ou d’ouvrages d’art…
Pourquoi élargir vos recherches au-delà des drones usuels ?
Tarek Hamel : Je travaille depuis deux décennies sur les drones aériens et fait partie des pionniers dans le domaine de la robotique aérienne. Ce domaine connaît depuis les années 2000 un engouement considérable tant chez des constructeurs privés que dans les laboratoires de recherche. De nos jours le vol automatique des drones est devenu chose commune, presque banale. D’ailleurs n’importe qui peut en piloter un. Toutefois, cette banalisation s’accompagne d’un nombre grandissant d’accidents, potentiellement graves, liés à la perte de contrôle de l’appareil. Cela révèle les limites du pilotage automatique actuel et nous rappelle que des progrès sont encore à faire dans le domaine des véhicules aériens. Ceci concerne également les avions de ligne. Les pilotes automatiques, actuellement en service, reposent en effet sur des conditions de vol très restrictives associées à des modes de vol très particuliers (vol essentiellement horizontal à vitesse suffisante et relativement constante pour les avions et vol quasi-stationnaire pour les VTOLs (véhicules capables de décoller et atterrir verticalement)) sans perturbations aérologiques excessives. Ces conditions sont celles qui permettent l’application des techniques de commande linéaires. Dès qu’elles ne sont plus satisfaites, les pilotes automatiques tendent à devenir inefficaces et la main est rendue au pilote humain dont l’expérience prévaut.
Dans mon projet, je souhaite améliorer le pilotage automatique en proposant une méthodologie de synthèse de loi de commandes sûres, robustes et efficaces pour les véhicules aériens (indépendamment de leur taille et de leur architecture mécanique) sujets à des perturbations pouvant être importantes et difficiles à prédire. Je vais toutefois m’intéresser plus spécifiquement aux drones de petite taille dont la difficulté de mesurer/estimer précisément les grandeurs nécessaires à la mise en œuvre des lois de commande est importante. À ceci s’ajoute le caractère non-linéaire des équations du mouvement et la diversité des plateformes (plus de 200 drones différents dans le commerce), ce dernier aspect justifiant déjà à lui seul l’intérêt de développer des méthodes de commandes génériques, unificatrices et robustes.
Hardware and software architecture for nonlinear control of multirotor helicopters
Performances d’une commande semi-automatique, intégrant une fonction d’évitement d’obstacle et une interface d’utilisation intuitive, qui facilite la prise en main par un opérateur inexpérimenté.
Audiodescription
Sur quels points allez-vous plus précisément vous concentrer ?
Tarek Hamel : Je vais m’intéresser à quatre volets de recherche en collaboration avec mes collègues Claude Samson et Minh-Duc Hua. Mon premier objectif concerne le développement d’une stratégie de commande unificatrice robuste et performante non seulement pour les véhicules ayant la capacité de décoller et d’atterrir verticalement (hélicoptère, quadrirotor, hexacoptère…) mais également pour les avions, les missiles, voire même les sous-marins. En effet, le déplacement de la plupart des véhicules confectionnés par l’Homme repose sur le principe d’un organe moteur engendrant une force de propulsion dans une direction liée au corps, complété par des actionneurs permettant de faire varier l’orientation du corps principal du véhicule.
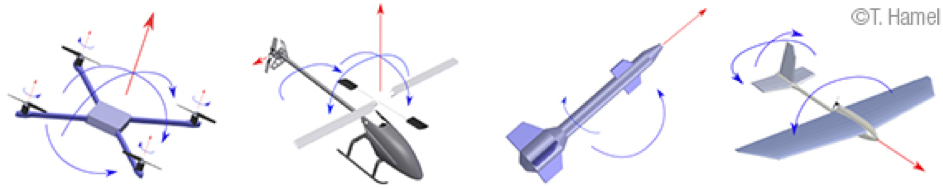
Alors que nos premiers travaux ont porté sur des véhicules à faible portance, tels que les drones de type quadrotor et les hélicoptères, je souhaite étendre l’approche considérée aux systèmes exploitant le phénomène de portance pour réduire la consommation énergétique lors de déplacements horizontaux à vitesse élevée (par exemple avions, drones munis d’ailes, véhicules hybrides capables de vol stationnaire et de vol de croisière à haute vitesse). Une étape dans ce sens a consisté à montrer dans certaines configurations de type fusée qu’il est possible de se ramener au cas de véhicules à faible portance. Un travail important portera sur l’extension aux véhicules utilisant des surfaces (principalement) planes génératrices de forte portance à vitesse élevée, tels que la plupart des avions actuellement en service. Un aspect complémentaire de ce travail sera de faire la jonction entre l’approche que nous développons et les méthodes classiques utilisées pour les systèmes de commande d’avions et de proposer une méthodologie simple et réaliste de modélisation.
Mon second objectif, motivé par l’implémentation physique des lois de contrôle, concerne l’estimation de l’état (position/orientation/vitesses) du véhicule obtenue à partir d’un ensemble de capteurs embarqués sur le véhicule (GPS, caméra(s) ou Lidar, centrale inertielle, sondes pitots…). Ces capteurs fournissent des mesures ne reflétant qu’une partie de l’état du véhicule. Par exemple, un GPS ne fournit que la position et la vitesse du véhicule par rapport à un référentiel absolu, une caméra et/ou un Lidar ne fournissent que des informations par rapport à l’environnement géométrique, les gyromètres d’une centrale inertielle embarquée donnent la mesure des vitesses de rotation de l’engin tandis qu’accéléromètres et sondes pitots intègrent les effets aérodynamiques impliqués dans leur mesure. Lorsqu’on impose une mission au drone, tel qu’un suivi de trajectoire par exemple, le drone doit pouvoir estimer (en temps réel) sa position par rapport à cette trajectoire, son orientation, ses vitesses de déplacement et, plus important encore, les forces auxquelles il est soumis, afin de garantir les limites de l’enveloppe de vol pour lequel il est conçu sans risque de perte de contrôle.
Le développement d’estimateurs robustes, précis, capables de gérer des dynamiques rapides et de fusionner les différents types d’informations produites par les capteurs embarqués, motive actuellement de nombreux travaux de recherche au sein de la communauté roboticienne et automaticienne. Nous travaillons depuis plusieurs années sur ces problématiques et avons, depuis peu, commencé à les aborder dans le cadre de la fusion multi-capteurs (vision/inertiel et GPS/inertiel/pitots).
Feature-based Recursive Observer Design for Homography Estimation
Validation pratique en temps réel d’un observateur d’homographie (transformation entre deux images d’une même scène planaire) à partir d’une mise en correspondance de points entre images et des données de gyromètres d’une centrale inertielle.
Audiodescription
Parallèlement aux directions de recherche évoquées précédemment nous souhaitons traiter le contrôle du drone évoluant en environnement contraint et évolutif, en particulier dans le cas de vols à basse altitude. En raison des limites des cartes de traitement informatique embarqué, il importe d’alléger les procédures d’estimation d’état, souvent gourmandes en temps de calculs et lorsque l’environnement est encombré, en exploitant au mieux les informations brutes au niveau des algorithmes de commande. Par exemple, la stabilisation d’un drone VTOL par rapport à son environnement, l’atterrissage d’un avion sur une piste, ou encore la poursuite d’une cible visuelle, sont des tâches pour lesquelles les caractéristiques géométriques observées dans les images d’une caméra embarquée peuvent être exploitées sans qu’il soit nécessaire de connaître la position. Il est aussi possible de réaliser des interactions plus complexes telles que celles impliquées dans l’appontage d’un hélicoptère sur un navire sans connaître le mouvement de ce dernier en exploitant la mesure du flot optique (une information liant la vitesse relative et la proximité du drone par rapport à son environnement). Cette mesure fournit l’information principale utilisée par les insectes dans leurs stratégies de navigation. Elle intervient notamment dans l’aptitude d’échappement réflexe d’une mouche, l’atterrissage en douceur d’une abeille sur une fleur soufflée par le vent, etc.
Landing of a quadrotor on a moving target using dynamic image-based visual servo control
Validation pratique de deux résultats théoriques complémentaires sur le contrôle appliqué à la navigation bio-inspirée de drones. L’originalité de la démarche réside dans le fait qu’aucune mesure de vitesse ni de position ne sont utilisées pour le contrôle. En outre seule la connaissance de l’accélération maximale de la plate-forme dans la direction verticale est exploitée dans la synthèse (aucun modèle de prédiction n’est utilisé pour obtenir les performances désirées en boucle fermée).